2.2. 时域中的离散时间系统¶
在时域中,离散时间系统对输入信号或者延迟信号进行简单运算处理,生成具有所需特性的输出信号。本节的目的就是通过Python仿真一些简单的离散时间系统,并研究它们的时域性质。
离散时间系统¶
本课程中,我们主要研究的线性时不变离散时间系统,形式如下的线性常系数差分方程来描述。
其中,\(x[n]\)和\(y[n]\)分别是系统的输入和输出,\(d[k]\)\(p[k]\)为常数,离散时间系统的阶数为\(�\max(N,M)\),表示系统差分方程的阶数。
若系统是因果的,还可以进一步将上述形式化简
已知\(x[n]\)和初始条件\(y[n_0-1],y[n_0-2],�\cdots,y[n_0-N]\),那么可以计算出\(y[n]\)。
利用Scipy包来对系统进行仿真
scipy.signal.lfilter(b, a, x, axis=-1, zi=None)
其中,\(b\) 和 \(a\)分别为系统差分方程的系数
\[a[0]y[n] = b[0]x[n] + b[1]x[n-1] + ... + b[M]x[n-M] - a[1]y[n-1] - ... - a[N]y[n-N]\]
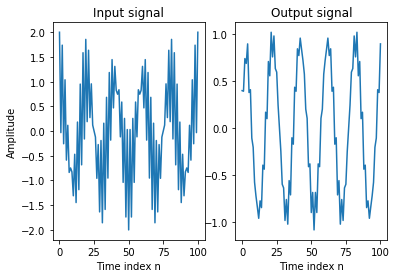
例:滑动平均系统¶
通过若干个正弦信号之和所组成的信号中滤除高频分量
[9]:
# 加载所需要的包
import matplotlib.pyplot as plt
from scipy import signal
import numpy as np
# 产生两个不同频率正弦序列
n = np.linspace(0,100,101)
s1 = np.cos(2*np.pi*0.05*n) # 信号1
s2 = np.cos(2*np.pi*0.47*n) # 信号2
x = s1+s2
# 平滑滤波处理
M = 5
b = np.ones([M,])
y = signal.lfilter(b,np.array([1,0,0]),x)/M
# 显示结果
plt.subplot(121)
plt.plot(n,x)
plt.ylabel('Amplitude')
plt.title('Input signal')
plt.xlabel('Time index n')
plt.subplot(122)
plt.plot(n,y)
plt.title('Output signal')
plt.xlabel('Time index n')
plt.show()
线性系统和非线性系统¶
对于线性离散时间系统,若\(y_1[n]\)和\(y_2[n]\)分别是输入序列\(x_1[n]\)和\(x_2[n]\)的响应,则输入为
的输出响应为
上式的叠加性质对于任意常量\(�\alpha\)和\(�\beta\)以及任意输入\(x_1[n]\)和\(x_2[n]\)都成立。
若存在一组非零的\(�\alpha\)和\(�\beta\),或者一组非零的输入序列\(x_1[n]\)和\(x_2[n]\),上述叠加性质不成立,则系统为非线性系统。
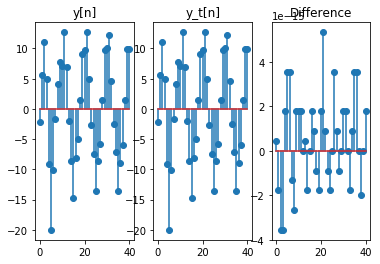
现在我们来研究下面这个系统的线性性质,
[2]:
# 产生混合信号:高频正弦+低频正弦
n = np.linspace(0,40,41)
s1 = np.cos(2*np.pi*0.1*n)
s2 = np.cos(2*np.pi*0.4*n)
a = 2
b = -3
x = a*s1+b*s2
# 定义系统的系数
num = np.array([2.2403,2.4908,2.2403])
den = np.array([1,-0.4,0.75])
# 系统处理(滤波)
ic = np.array([0,0]) # set initial
zi = signal.lfilter_zi(num, den)
y1,_ = signal.lfilter(num,den,s1,zi=zi*ic) # y1[n]
y2,_ = signal.lfilter(num,den,s2,zi=zi*ic) # y2[n]
y,_ = signal.lfilter(num,den,x,zi=zi*ic) # y[n]
yt = a*y1 + b * y2
# 计算叠加输入的响应和输出直接叠加的差异
d = y-yt
plt.subplot(131)
plt.stem(n,y)
plt.title('y[n]')
plt.subplot(132)
plt.stem(n,yt)
plt.title('y_t[n]')
plt.subplot(133)
plt.stem(n,d)
plt.title('Difference')
plt.show()
时不变系统和时变系统¶
对于离散时不变系统,若\(y_1[n]\)是\(x_1[n]\)的响应,则输入
的输出为
其中\(n_0\)是任意整数。上面的输入输出关系,对任意输入序列及相应的输出成立。
若对至少一个输入序列及其相应的输出序列不成立,则称系统为时变的。
例子¶
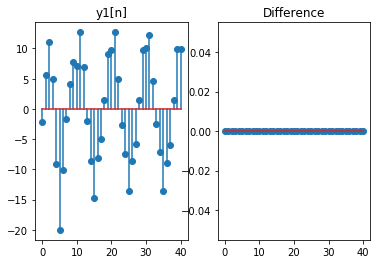
验证如下系统是否为时不变:
我们产生两个不同的输入序列\(x[n]\)和\(x[n-D]\),计算出相应的输出序列\(y_1[n]\)和\(y_2[n]\),以及二者的差\(d[n]=y1[n]-y2[n+D]\),若\(d[n]\)为0,则系统是时不变的。
[3]:
# 产生混合信号:高频正弦+低频正弦
n = np.linspace(0,40,41)
a = 2
b = -3
D = 10
x = a*np.cos(2*np.pi*0.1*n)+b*np.cos(2*np.pi*0.4*n)
xd = np.concatenate((np.zeros([D,]),x),axis=0)
# 定义系统的系数
num = np.array([2.2403,2.4908,2.2403])
den = np.array([1,-0.4,0.75])
# 系统处理(滤波)
ic = np.array([0,0]) # set initial
zi = signal.lfilter_zi(num, den)
y1,_ = signal.lfilter(num,den,x,zi=zi*ic) # y1[n]
y2,_ = signal.lfilter(num,den,xd,zi=zi*ic) # y2[n]
y2D = y2[D:] #计算输入为x[n-D]的响应的D个单位超前
# 计算输入为x[n]的响应与输入为x[n-D]的响应的D个单位超前之间的差
d = y1-y2D
plt.subplot(121)
plt.stem(n,y1)
plt.title('y1[n]')
plt.subplot(122)
plt.stem(n,d)
plt.title('Difference')
plt.show()
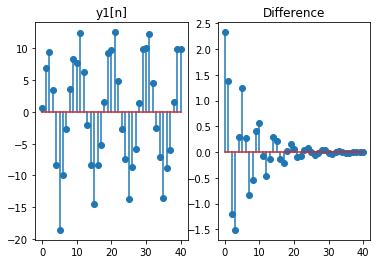
若上述系统的初始条件不等于0,系统还是时不变系统吗?
[4]:
ic = np.array([1,0]) # set initial
zi = signal.lfilter_zi(num, den)
y1,_ = signal.lfilter(num,den,x,zi=zi*ic) # y1[n]
y2,_ = signal.lfilter(num,den,xd,zi=zi*ic) # y2[n]
y2D = y2[D:] #计算输入为x[n-D]的响应的D个单位超前
# 计算输入为x[n]的响应与输入为x[n-D]的响应的D个单位超前之间的差
d = y1-y2D
plt.subplot(121)
plt.stem(n,y1)
plt.title('y1[n]')
plt.subplot(122)
plt.stem(n,d)
plt.title('Difference')
plt.show()
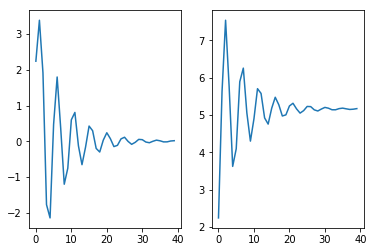
线性时不变系统、冲激响应和阶跃响应、卷积¶
线性时不变(LTI)系统既满足线性性质又满足时不变性质。
离散时间系统对单位样本序列\(�\delta[n]\)的响应称为单位样本响应,或者冲激响应,用\(h[n]\)来表示。
有限冲激和无限冲激响应系统: 冲激响应序列\(h[n]\)的长度无限长时,称系统为无限冲激响应系统;冲激响应序列\(h[n]\)的长度有限长时,称系统为有限冲激响应系统。
离散时间系统对单位阶跃序列\(�\mu[n]\)的响应称为单位阶跃响应,或者阶跃响应,用\(s[n]\)来表示。
离散时间系统输入信号\(x[n]\)时的输出响应\(y[n]\),可以表示为冲激响应\(h[n]\)和输入信号\(x[n]\)的加权累加和
通过简单的变量代换,也可表示为
上述两个式子称为序列\(x[n]\)和\(h[n]\)的卷积和
其中符号\(�\circledast\)表示卷积和。
[5]:
N = 40
# 定义系统的系数
num = np.array([2.2403,2.4908,2.2403])
den = np.array([1,-0.4,0.75])
dt = 1
# 系统的冲激响应
t, h = signal.dimpulse((num,den,dt),n=N)
t, s = signal.dstep((num,den,dt),n=N)
plt.subplot(121)
plt.plot(t,np.squeeze(h))
plt.subplot(122)
plt.plot(t,np.squeeze(s))
plt.show()
[6]:
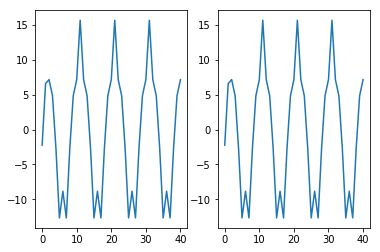
# 系统的输出等于冲激响应序列和输入序列的卷积
n = np.linspace(0,40,41)
a = 2
b = -3
x = a*np.cos(2*np.pi*0.1*n)+b*np.cos(2*np.pi*0.4*n)
# 定义系统参数
num = np.array([2.2403,2.4908,2.2403])
den = np.array([1,0,0])#np.array([1,-0.4,0.75])
# 利用lfilter计算
ic = np.array([0,0]) # set initial
y1,_ = signal.lfilter(num,den,x,zi=ic) # y1[n]
# 利用卷积计算
t, h = signal.dimpulse((num,den,dt),n=41)
y2 = signal.convolve(x,np.squeeze(h))
plt.subplot(121)
plt.plot(n,y1)
plt.subplot(122)
plt.plot(y2[:41])
plt.show()
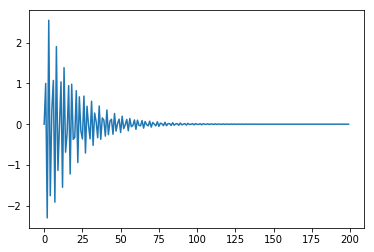
BIBO稳定¶
若对于任意有界输入序列\(x[n]\),其输出\(y[n]\)也是一个有界序列,则该离散时间系统是有界输入有界输出(BIBO)稳定的,也就是说,若
则响应的输出\(y[n]\)也有界,即
当且仅当线性时不变离散时间系统的冲激响应序列\(h[n]\)绝对可和时,改线性时不变系统是BIBO稳定的,即
[7]:
# 定义系统参数
num = np.array([1,-0.8])
den = np.array([1,1.5,0.9])
# 冲激响应序列
t, h = signal.dimpulse((num,den,1),n=200)
h = np.squeeze(h)
N = 200
parsum = 0
for k in range(N):
parsum = parsum + np.abs(h[k])
print(parsum)
# 画出冲激响应
plt.plot(t,h)
plt.show()
35.35909090875415
因果系统¶
若\(y_1[n]\) \(y_2[n]\)分别是因果离散时间系统输入信号\(u_1[n]\) \(u_2[n]\)的响应,则当
时
当且仅当线性时不变离散时间系统的冲激响应序列\(h[n]\)满足
该LTI离散时间系统才是因果的。
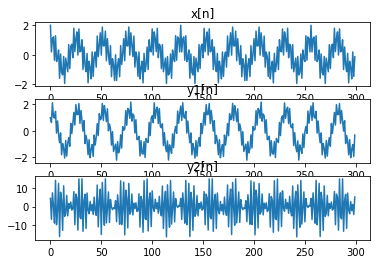
滤波概念的解释¶
考虑用如下差分方程描述的两个离散时间系统:
系统1¶
系统2¶
对输入
计算上述两个系统的输出。
[8]:
# 产生混合信号:高频正弦+低频正弦
n = np.linspace(0,299,300)
s1 = np.cos(2*np.pi*n/256*10)
s2 = np.cos(2*np.pi*n/256*100)
x = s1+s2
# 定义两个系统的系数
num1 = np.array([0.5,0.27,0.77])
den1 = np.array([1,0,0])
num2 = np.array([1,-0.53,0.46])
den2 = np.array([0.45,0.5,0.45])
# 系统处理(滤波)
ic = np.array([0,0]) # set initial
y1,_ = signal.lfilter(num1,den1,x,zi=ic) # y1[n]
y2,_ = signal.lfilter(num2,den2,x,zi=ic) # y2[n]
plt.subplot(311)
plt.plot(n,x)
plt.title('x[n]')
plt.subplot(312)
plt.plot(n,y1)
plt.title('y1[n]')
plt.subplot(313)
plt.plot(n,y2)
plt.title('y2[n]')
plt.show()
[ ]: